换个角度了解电机和电磁拖动——电机、发电机、电磁铁繁复品种背后的清晰骨干
应用札记2024-08-29
通信作者:成红玉
校阅:谭磊 姚若亚 徐彪
摘要
电机、发电机、电磁铁历史悠久种类繁多,本文将换个角度整理和阐述电机以及电磁拖动的相 关概念。首先,文章对电机和电磁拖动装置进行了分类,并分析了电调部分的功能层级,为读者提供了清晰的认识框架。随后,文章探讨了电磁拖动系统的复杂性,并通过具体的产品实例 SGM42507,展示了如何驱动直流有刷电机、电磁铁/电磁阀、电机绕组。此外,文章阐释了电机的商品化分类和电机参数优化分类,并特别强调了步进电机的工作原理,进而有助于理解伺服电机和定位电磁铁的控制机制。文末列举了圣邦微电子的电机驱动系列产品,为读者提供实用的解决方案和技术参考。
1 前言
说清楚电机、发电机、电磁拖动挺困难。首先它涉及的概念跨度太大,做机电的往往侧重电磁、力学和材料,顾不上驱动;做驱动的则无暇顾及小功率廉价系统。再者这组产品历史太长,太多的产品细分、技术方案的历史局限性掩盖了其内在的特征的一致性,后来者只见树木不见森林。这个情况随着产品的更替正在改变:越来越多的应用在使用通用规格的电机,功率开关的问题成为独立于驱动和控制的问题,IGBT、GTO、SCR、TRIAC、Darlington、BJT的复杂性因MOSFET、CoolMOS、GaN、SiC的出现而被简化。本文试图从内在结构差异和电调部分的分割提供一个新的视角,梳理电机和电磁拖动的简单脉络。
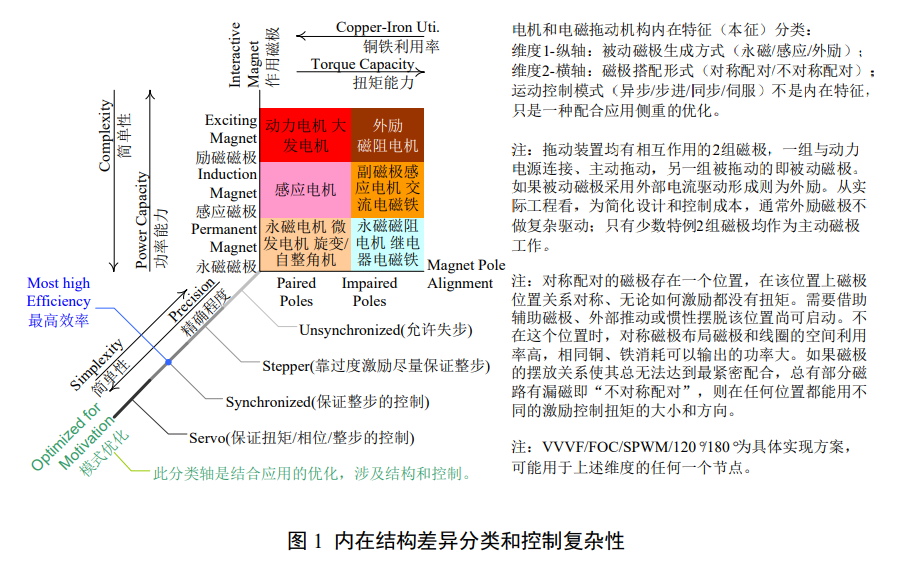
除了少数相互作用的对侧都主动出力的情况,所有拖动装置都有一个主动侧和一个被动侧。以 被动侧的磁场如何产生作为 1 个维度,以主动侧磁枢(不一定有铁芯,如空心杯绕组)和被动侧磁极(磁轭)完全相对与否作为第 2 维度,可以把包括磁铁在内的所有电磁拖动装置分类成图 1 所示的 6 种组合。图 1 中的第 3 维度与这种分类无关,是这些分类都可能有的工作模式或优化方向。
所有这些装置都有配合的电调部分,至少有配合的接触器和断路器。如果把励磁驱动和换向这 些专门的电调剥离,也不考虑功率开关及其驱动器的种类,则电调部分可从其包括的功能层级和所管理的通道数 2 个维度分类。除了最简单的衔铁驱动可以使用半个开关臂外,电调部分总是成对地把开关接成推挽图腾柱使用。常见通道数是 1、2、3、4、6、8 通道,或 0.5H、1H、1.5H、2H、3H、 4H,其中 H 指 H 型桥接。图 2 给出了这些功能层级以及一个电调电路模块所包括的组合情况。其中,电控都完整地包括从运动控制到功率开关的所有层级,差异只在于其复杂性和如何分割。
电磁拖动应用电路还有调压和驱动换向。把这两部分和上图中电控、励磁和换流组织成一个选项,再配合额定工况,可以把拖动应用的电路模块或集成电路的用途、应用场合和包括的层级用下表表达出来,便于直观获取电机和电磁拖动的对应信息。
| 电控/换向/调压/换流/励磁 | 电机结构 | 额定工况 | 运动控制 | 参数控制 | 开关控制 | 开关驱动 | 功率开关 |
2 清晰骨干不改支末细节繁杂多样
除了兴趣使然,业者了解学习电磁拖动的目的不外乎寻找业务机会,需要了解电磁拖动清晰骨架下支末细节的复杂性。这个复杂性表现与 3 个方面有关,即所有拖动系统中所有的主动侧和被动侧都是互耦互易的,动作控制大多是嵌套的,以及开关元件特性不同、可控制要求不同导致的电路多样性。
2.1 互耦互易和混合作用
主动侧线圈里面出力电流、励磁电流是伴随出现的。主动侧和被动侧之间的磁场由励磁和反励磁电流(感应电流)共同决定;进一步磁场梯度决定扭矩或推拉力,串联电流和(运动)反电动势(BEMF)决定出力。所观察和控制的量全部包括瞬时值及其变化率。如果负载拖动电机,包括负载惯性或是势能释放,反电动势成为主动的电动势(EMF)发电输出。绕组电感的漏感和励磁电感本身受不断变化的磁路产生参数调制造成非线性影响,导致对电磁拖动的测量和控制都超出了线性系统的范围。大多设备的机械出力是洛伦兹力、安培力(感应力)和磁场储能势差、磁阻或凸极效应(磁阻力)的混合作用的结果。
2.2 多个过程的嵌套
图 2 显示了电机控制是一层层实现的。运动控制要求控制目标如何表现,参数控制把表现解释成对若干参数(扭矩、速度、相位)的控制,到这一步的层次可以认为是很清晰的。后面的层次则表现为复杂的嵌套和组合。
常态运行时从开关控制层到开关驱动层则同时涉及 3 个不同层次的开关控制;(A)是调节供给电机的电压或电流的开关控制,(B)是根据线圈位置改换驱动连接的开关控制,以及(C)是给绕 组产生一个等效电压/电流的斩波开关控制。(A)部分可能包括续流电感和储能电容,使其更像对纹波要求不高的开关电源;(C)部分可能包括续流电感和电容,主要是用于减小开关浪涌。即使(A)到(C)全部合并到一个电路模块中实现,例如 SPWM 1 驱动模块,所产生的波形也是具有交替半正弦波低频包络的高频开关推挽脉冲序列。在这样的推挽脉冲序列的每个上冲和下冲过程都经历串联电感电流续流或归零2(包括电流淬灭)的过程,每个上冲和下冲还要根据调速、调相、调扭矩要求决定在一定序列持续时间内转入飞轮3、快衰落4(涡流减速)、主动刹车5(反向激励和回授刹车)。动作的实现是驱动层完成的,选择哪种开关方式配合由开关控制层决定。暂态过程控制,比如拖入、脱出、嵌顿和抛载,前两个是主动要求的过程,后两个是被动触发的过程;后两个过程的反应是不同参数的拖入或脱出。拖入和脱出根据控制精细程度进一步分解成控制预案的堵转启动、扭矩维持6、整步拖入和整步脱出7,以及保护预案的保护脱出、失步运行(瘸行)8 和再整(尝试恢复)。
2.3 旋向控制以及其它细节繁杂多样
旋向依靠机械方法或依靠启动时磁极不对偶控制。除发电机和电磁铁外,其余拖动设备在启动时需要专门定向动作,包括短时间合成漏磁磁路和预留启动辅助绕组和(漏磁)磁回路。
拖动系统的强大惯性和与之相关的常态和暂态巨大负荷差异对从电源供应到负载输出都要有对应的设计,需要保护状态和常态之间设计一个过载状态和一个启动预备状态。两个状态出现在整个链路的各个环节并需要一定的可调整性。例如从电源的接触器、断路器需要容忍短时间堵转9,同一电源链路上的其它设备则需要容忍短时间启动跌落(Cold Crane)。
驱动环节需要配合开关器件的特性。例如对 IGBT 的二次击穿风险10需要以要求的式样驱动11,对所有开关种类都需要驱动器就近配合保护动作,上下管协同减少死区12。
拖动系统需要配合多个检测电路工作,这些检测电路用于保护和取得运行参数。除了电压电流检测,常用检测还包括位置、角度、相差、扭矩和转速检测;这些检测每种都有不同种类的变送器、传感器13可能使用,需要不同的激励、读出电路。
2.4 阶段性产品概念混淆加剧的复杂性
电控产品以及电机本身的演进产生的阶段性的、有局限的概念累积和流传下来,导致的混淆使理解电控产品更加复杂。一个例子是在降低输出 PWM 波占空比使电机减速时可能观察到 PWM 包络幅度上升的现象被解释成是电机所固有的特性,从而要求选用较高电压裕度的驱动器和开关14。这实际是突然降低占空比、电动势被推挽臂斩波形成升压过程,电源不能吸入或上管不允许倒流才会出现的现象。另一个例子是采用反馈控制电流的步进电机或音圈电机驱动电路给定的电流是对应某静态位置的电流15,如果在移动中(包括两个静态位置间的移动和连续地移动)则驱动电流并不是该电流,而需要增加一个与对负载的拖动输出有关的分量。这种有意无意的忽略掩盖了电机或音圈电机使用时超常的噪声和抖动,是驱动设计不良产生的真相。将励磁电感电流回送到电源,或将与惯性储能有关的电动势送回到电源,这是两个伴随的独立过程,常常被混淆。
3 说明电机驱动的一个产品实例
SGM42507是一个为小电机(<7.5V,1.5A;有刷电机调速和换向、其它类电机绕组驱动)和电磁铁设计的全桥驱动器,可用于直流电机驱动、电机绕组驱动和电磁阀驱动等。它的工作模式完整,有堵转扭矩维持、调压 PWM 驱动、不制动(飞轮或滑行)、涡流制动(或对应慢衰落)、电流淬灭(对应快衰落,不直接对应主动制动或动能回授)欠压脱出保护和短路脱出保护,有足够的代表性。 SGM42507 选择了仅有 6 个引脚的 TSOT23 和 SC70 封装,需要复用 1 个输入引脚兼做输出和简单时序组合,利用仅有的 2 个控制引脚完成使能/休眠待机控制、驱动方向控制和不制动(电流淬灭后滑行或飞轮)、涡流制动、电流淬灭控制,以及以不同方式输出 PWM 和指定进入休眠待机后的驱动输出状态。对这 2 个控制端,即 PH 和 EN\FAULT 的操作及其作用见表1。
表 1 对 PH 和 EN\FAULT 的控制及其作用汇总
| 使能和休眠待机:EN\FAULT 被拉高/ 拉低并保持。 | EN\FAULT 拉低超过 1ms 转入休眠待机。拉低后 OUTA 和 OUTB 状态跟PH 是否有变化有关。 |
| 驱动方向控制:EN\FAULT 高期间 PH 输入高或低。 | 输入高 OUTA 置高电位、OUTB 置低电位驱动向,或者反之。 |
| 不制动:EN\FAULT 被外部拉低,随 即变化 PH 输入。 | EN\FAULT 被拉低后变化 PH 输入使 A 和 B 的输出变化到新的方向,保持至驱动电流维持期间;驱动电流回 0 后 A 和 B 转入高阻并维持在高阻态。 |
| 涡流制动:EN\FAULT 被外部拉低, PH 保持不变。 | OUTA 和 OUTB 均置低电位输出。 |
| 电流淬灭: PH 变 化 后 立 即 拉 低 EN\FAULT,或 EN\FAULT 低后立即变 化 PH。 | PH 变化后立即拉低 EN\FAULT,电流跟 PH 指定方向一致,OUTA 和 OUTB立即输出低;不一致则等一致后输出低。如果 EN\FAULT 低后变化 PH,则输出电流与新指定方向一致时 OUTA 和 OUTB 转高阻。 |
| 单 臂 PWM 输出: PH 保 持 , 以 EN\FAULT 输入 PWM。 | 按PH 的指定,低电平的一臂保持低电平,高电平一臂跟随 EN\FAULT 的输入 PWM 信号输出。 |
| 互补 PWM 输出:EN\FAULT 保持高, PH 输入 PWM。 | 按PH 的输入使 OUTA 和 OUTB 输出互补的 PWM 信号。 |
| 指定休眠待机时的状态:EN\FAULT 拉低后控制 PH。 | 如果 PH 不变,待机后 OUTA 和 OUTB 保持低输出。如果 PH 变化,后转入高阻。 |
SGM42507 具有 3 个欠压脱出和 2 个过流脱出门限可选。堵转或过载发生触发过流门限时, SGM42507 的 OUTA 和 OUTB 同时输出低,直到电流下降到滞回点。如果超过预定时间不能恢复, 则 OUTA 和 OUTB 转同时输出高、尝试躲避正电源短路状态。如仍不能缓解,OUTA 和 OUTB 在同 时高和同时低之间按预定时间转换,使过电流导通分时通过上管和下管,减少应力。如出现过热或欠压,OUTA 和 OUTB 转入高阻停止输出 16。过载时 EN\FAULT 被 SGM42507 强行下拉产生告警输出 17。下拉期间 SGM42507 忽视这种它自己产生的下拉,直到告警条件解除后再读取 EN\FAULT 输入状态。
3.1 使能和休眠待机控制,以及其后对输出状态的控制
3.2 驱动直流有刷电机
驱动直流电机一般需要完成起止、调速和换向几个动作。调速包括 PWM 调压调速和加速-飞轮(滑行)的调速方式。如果有换向绕组,可利用转换驱动方向来实现不同方向的驱动。对于利用预置扭矩方式确定旋向的电机,则无法利用驱动电路换向。不定向电机因停止时的阻力残留,往往导致每次启动方向不一致,可以利用再次启动换向。对启动的改善包括启动时输出较高电压,以及在启动堵转时利用暂停驱动产生顿挫减少静摩擦。SGM42507 的抗堵转设计在输出电流达到脱出门限或电压低于脱出门限时转入下管或上管同时导通的续流状态、维持扭矩,并在过流、欠压恢复后继续驱动。
可以利用单臂 PWM 输出变化有效输出电压的方式实现电机调速,有关波形见图 7。如需要变化 旋向则可通过调换 PWM 输出臂实现。这种方式电感电流处于慢衰减模式,电机以涡流方式减速, 比采用双臂 PWM 方式减速慢,但功耗低。如果配合对 PH 的延迟驱动,则在 2 个 PWM 输出之间电 机转入飞轮运行,可进一步降低功耗,这时驱动电路没有任何刹车作用。除了用于电机等感性负载, 单臂 PWM 也可用于对阻性负载驱动的功率调节。
双臂 PWM 输出的波形见图 8。双臂 PWM 输出对速度调节较快,同时可实现旋向转换、用于双向调速和磁指针角度控制。双臂输出在 1/2 占空比时电机停转,电感平均电流为零。这时电感电流往复如图 9 所示18,电感电流以快衰落往复。双臂 PWM 对阻性负载驱动无调节能力。
3.3 电磁铁/电磁阀驱动
驱动电磁铁/电磁阀时,一般由于绕组电阻偏大、行程小,真正利用电流、电压脱出的机会不多(除非使用高速强力大行程电磁铁)。图 10 的波形显示了一个衔铁弹簧自复位电磁铁在衔铁加速、限位和复位时的波形,可识别到限位撞击的复位行程发电。这些信号可为控制系统操作电磁铁/电磁阀提供状态参考依据20,这种简单控制可用于一些要求不是很高的应用中,如红外滤光片翻板等。如需控制加速、减速、急停和抖动吸收则需要利用外部电路快速控制 SGM42507 开关实现,利用飞轮状态方便监测复位过程。SGM42507 响应速度快,可满足大多电磁铁/电磁阀驱动波形合成需要。双臂 PWM 方式可用于悬浮指针等任意定位应用。参考图 11,借助其高速响应能力和移动反馈,它也可以用于开关驱动风门、光圈调节场合21。
3.4 电机绕组驱动
SGM42507 是一个完整的 H 桥,可用多个 SGM42507 来组成多绕组电机的绕组驱动。步进电机、磁阻电机、同步电机、异步电机的电调电路都包括位置或/和扭矩测量以及 PWM 或 SPWM 脉冲序列生成。参考图 12,SGM42507 可以配合电调部分实现驱动和驱动保护。
4 实际电机和相关商品产品分类
图 13 是大功率 3 对极定子绕组连线示意、2 个绕组照片和一个对照的小功率 3 对极定子绕组照片。显然无论是哪个产品绕组之间都存在严重耦合。进一步参考图 14,可见同样极数的产品的缠绕方案存在很大差异。这些方案在相同的空间里铜铁填充的比例不同,反映了对特性要求的不同,如对速度、出力、定位能力和效率的不同要求。
由图 15 无法判断这是什么电机,只能看出该电机有刷。事实上它确实可能属于不同电机商品分类。电机本身不能确定是同步电机还是异步电机,是直流电机还是交流电机。电机所能做出的分类如图 1 所示的彩色部分的分类,其余是参数优化和驱动电调决定的。任何电机或者发电机的绕组看到的总是交流电,否则会因稳定磁场像电磁铁一样被停止在特定位置。
常见的电机分类大多跟历史演进有关,发展到今天出现了大量交叉和重复。最经常听到的分类即交流电机和直流电机,简单讲就是可直接通工频交流电则可以工作的电机和需要通直流电才能工作的电机。交流电机和直流电机并不能包括那些需要配合不是工频的交流电和通直流但需要配合电调电路才能工作的电机,也就是说不是所有电机一定可以分为交流电机和直流电机。
交流异步电机和交流同步电机是特指在交流电工频供电条件下是异步还是同步23。电机旋转经常处于与供电相位不同步状态的(或者不要求同步的)即异步电机;要求或追求旋转与供电相位同步的即同步电机。在额定条件稳定工况下异步电机肯定处于同步状态,它仅仅是控制比较粗放,在工况有变化时容易失步。同步电机是力图保持同步的电机。如果负载有变化它利用变化工作电压或励磁强度保持同步,启动时利用离合机构防止负载顿挫导致失步。那些通过变频变压调节转速保持同步运行的电机和电控不被分类为交流同步电机。
直流电机是相对于交流电机做的分类,可以追溯到早期直流发电和交流发电的时代。直流发电机和直流电机都是自带整流机(利用电刷或自整角机)的装置,电压波动和负载波动都不大。这个地方的所谓直流电机跟直流无刷电机没直接关系,作为交流电机的互补区分出直流电机的时候只有有刷电机。
BLDCM 即直流无刷电机,指一个采用特定技术实现的产品,即利用电子开关分段合成 3 相波驱动的电机产品。直流无刷电机内部一定包括一个电子开关。其合成的波形从一开始的 3 段24合成(120°25,也叫做 6 步驱动)到 5 段合成(150°)和 2 段(180°,6 步,利用 PWM 合成),再到直接合成正弦波。3 段合成的三相波形和正弦波波形的对照可见图 16。
BLDC 技术又进一步发展了采用 PWM 控制驱动电压的方案,采用 PWM 调压的 2 段合成波形见图 17 左侧,3 段合成波形见图 17 右侧。采用方波或阶梯波驱动与正弦波驱动阶梯处的电流谐波导致了不必要的励磁强度,降低了铁芯能力的利用和加大了电调系统应力。与直流无刷电机互补的是交流有刷电机,为取消直流电机的电刷而开发的 BLDC 电控同样可以用于交流有刷电机,BLDC中的 DC 反映了其演进过程,不是其适应场合的限制。
伴随着三相 BLDCM 概念的普及也出现了两相 BLDCM 和单相 BLDCM。限于电调部分的成本与三相差异不大,尤其再考虑到定向绕组的驱动需要,给单相有刷电机配电调做成 BLDCM 一直都不划算,这种两相和单相 BLDCM 没有被市场接受。
BLDCM 是一个产品概念,强调的是利用电调取代了电刷换流,其本质是一个把直流变换成频率不限于工频的交流。与随动的电刷不同,BLDCM 不一定能保证换流与磁枢、磁轭位置随动,也不一定要随动。如果把 BLDCM 的电调部分分离下来,其配套的电机就是工作频率不限于工频的交流电机,包括他励电机和感应电机在内的各类交流电机。BLDC 电路是最早开发的电调电路。限于当时的硬件成本和软件成本,BLDC 电路无法经济地满足同步和其它精细控制需要。BLDC 电路包 括位置检测部分、波形合成部分和驱动部分(直接驱动绕组或者驱动功率开关)。随着硬件和计算成 本的大幅度下降,BLDC 电路也从当初采用霍尔器件做转子位置检测演进到了测量和分析电流和电压的相位关系判断旋向和是否进入同步运行,但从启动到稳定同步运行普遍仍以开环方式过渡。只要电机和负载允许大幅度的转速变化,利用具备 PWM 调压能力的 BLDC 电路可以实现变频变压调速(VVVF)。BLDC 电调电路与后来发展起来的基于场矢量控制的 FOC(VC)电调电路相比其硬 件成本完全一致。FOC 没有高次谐波和全部闭环控制、应力小,可充分利用材料的极限条件,从而提高了铜铁利用率。随着软件和计算成本下降,FOC 电调电路会取代 BLDC 电调电路。如果仅从物理和控制结构上看,FOC 是一种精细控制的 BLDC。实际为了区别于已经普及的 BLDC,市场行销中 FOC 一直被当做一个独立的产品概念。除了工作的交流频率范围有所扩大外,FOC 对电机结构和种类也没有特别要求。
另外一个维度的商品分类即永磁电机和非永磁电机。这个分类几乎与其它分类正交,也就是说前面提到的和后面将提到的商品分类中任何一种都可以是永磁电机、也可以是非永磁电机。永磁电机更像是一个产品门类,而不是一个分类维度。永磁电机之所以得到广泛认知是因为其控制相对简单,并配合一类电调电路产生了永磁同步电机产品 PMSM,这个地方的同步电机不再像前面提到的交流同步电机一样限于以工频频率工作。由于开关磁阻电机里面也采用了永磁体加大漏磁程度,因此不能采用是否使用了永磁体而判断哪个是永磁电机哪个是非永磁电机。如果非得把永磁电机作为一个维度对电机分类,非永磁电机则包括带有永磁体的开关磁阻电机、他励电机和感应电机。
除了 BLDC 和 FOC,电调电路还包括历史更为久远、并且仍在广泛使用的调压调速电路和旋向控制电路,即前面例举的 SGM42507 主要的使用场合。这 4 类电调电路均不限功率开关种类和开关驱动器种类,也适用于所有的电机种类。像 TI 等若干公司把这部分电路归类到不同电机类型中是其市场演变过程形成的局面,一定程度上妨碍了对电机及其相关产品的认识和了解。
图 18 示意的两种换向绕组磁极布置与电机分类的一个维度有关,即主动磁极(磁枢)和被动磁极(磁轭)是否对偶有关。从图 18 所示的布置看,一部分空间被用于形成换向电极,降低了铜铁对空间的填充,从而降低了铜铁利用率。换向极导致主动磁极和被动磁极空间位置不对偶,从而可以有明确的初始拖动方向。为了改善这种给每个极增加伴随的绕组或者对每个极切槽的利用率损失,发展出了利用极数不匹配产生等效的不对偶的磁极布置方式,取代了这种专用的换向极的布置方案。
图 19 显示了多种不匹配磁极布置的情况,包括非成对极数的 3 极转子、1 对极-3 对极配置、2 对极-3 对极配置、4 对极-6 对极配置和 3 对极-1 对极配置;右侧 4 幅图是利用启动时改变绕组驱动顺序,制造不匹配、定向启动的情况(黑色虚线框所示)。
利用启动时改变绕组驱动方式定向启动是以增加驱动电路的复杂性为代价的。图 19 右侧图中 Step 0 和 Step2 中转子和定子凸极的位置关系一致,这时在定子上对称励磁不产生定向扭矩。如果分开激励 4 个绕组,生成 Step 0 所示的定子磁场,即获得向逆时针旋向扭矩。如果不考虑启动,定子绕组可作为单个绕组驱动,按转子位置转换驱动方向即可维持旋转。
三相交流电机和单相交流电机是两类常见的电机产品类型,包括优化到工频的和可以使用到其它频率的。同样,这两类产品也只是商品名,并不适合作为电机分类的维度。如果把换流器分离出来,则所有电机都是交流电机。一个电机是三相还是单相与电机内部的磁极数量和绕组数量没有必然关系(除了单绕组和双绕组无法连接成三相这个固有限制),它与磁极分组和按分组引出绕组连线有关。所有偶磁极对数三相在这里指有固定相位关系的三相,同时三相绕组可自由连接成星形或三角形。图 19 中间是 3 极和 3 对极三相漏磁电机的绕组布置示意(蓝色虚线框所示),右侧可以作为无漏磁(对偶的)单相电机绕组布局示意(黑色虚线框所示)。
三相交流电机和单相交流电机通常指工频工作的、图 19 中间图形和图 18 右侧图形所示的漏磁电机。但这个命名并不排除其它频率和无漏磁的电机。只有漏磁的三相电机和单相电机可以通过改变接线相序和换向绕组的串联方向的方式来改变旋向。对偶布局的电机,即使绕组组织成 3 组,要 通过图 19 右侧示意的启动时改变绕组驱动顺序的方式定向,也需要把 3 组绕组各自独立驱动才能实现,这时需要 6 个推挽臂组织成 3 个全桥驱动,而不像漏磁三相交流电机采用 3 个推挽臂、按 120° 固定相位关系驱动即可。
如果不考虑如图 20 所示沿轴向做空间布置优化的情况,以及对转速、扭矩、扭矩均匀性、角度控制的单个或者若干个特性的优化,以空间和材料特性利用率看,图 19 中间的三相绕组和磁极布置是最优化的。磁通时间变化和空间变化呼应、有明确旋向,出力连续、应力波动小。铜铁空间占比互补、方便调整,缠绕简单、方便轴向延伸。
5 与参数优化有关的电机种类
大量电机商品种类对应特定应用需求,是配合电调满足特定参数要求、对铜铁利用、空间利用追求的、堪称艺术品的专门设计。图 21 是一个典型的三相交流电机的结构,用来与图 22、图 23、 图 24 不同结构优化的电机作对照。
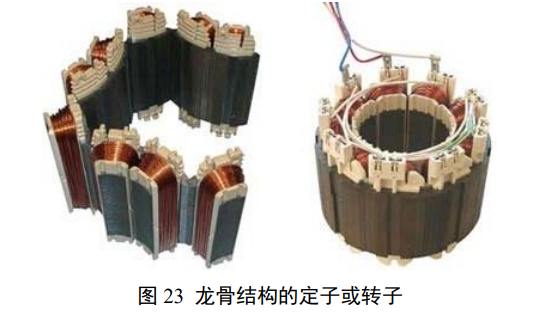
图 13 左侧图是图 21 缠绕试图产生的磁场,在轴向中间区域转子线圈相当于伸到了定子线圈的中间、软磁材料的感应增强了定子和转子耦合区域的磁场。在旋转平面上的连线则在径向上相互远离、减小无效耦合。对极齿槽的磁场变化导致高次谐波,利用图 24 所示转子开槽倾斜、同时与多个定子极齿耦合予以均化、降低。图 22 则显示了延长轴向尺寸提高磁通量、加大出力的优化,利用锥形耦合面提供轴向推力的优化,利用空心杯无磁饱和低惯性良好动态和高速的优化。龙骨结构面向制造和维护方便优化;整体压铸铜芯降低电阻、提高感应电流和降低制造偏差(相对于焊接和组装的鼠笼线圈)。除了图示的轴向推力转子和铜芯转子显然是用于感应电机外,这些参数优化结构适用于前面提到的所有电机商品分类,有刷、无刷、交流、直流、同步、异步、漏磁(磁阻)、对偶、永磁和非永磁都可以。同时也都可以利用调压、换相(序)、VVVF 和 FOC(VC)进行调速、换向,以及使用或者不使用包括霍尔、旋变或编码器做磁极位置传感。
6 步进电机、伺服电机、定位电磁铁
步进电机、伺服电机和定位电磁铁从结构上讲都是漏磁的,即通过改变漏磁情况(磁阻)实现动作。步进电机利用磁阻差做角度位置约束,每次步进都是突破一次嵌顿。无论是动态的还是静态的,任何电机都是依靠磁阻差实现旋转动作和会表现出嵌顿的,但只有传统的步进电机需要强化和利用嵌顿保持位置和实现按步移动,而其它电机则尽量减少嵌顿和保持连续移动。做细分驱动的步进电机则是反步进电机传统的努力方向。它利用控制相电流的比例控制合成磁极的位置,使等效的嵌顿位置可以在由铁芯(或线圈)形成的嵌顿位置间偏离,提高定位分辨率,利用电流大小控制嵌顿的约束力。图 25 是可当成步进电机使用的漏磁电机(左侧)、利用凸齿的步进电机(中间)和可作为伺服电机使用的盘式电机(右侧)结构的示意,配合后续部分说明工作原理及其结构优势。
步进电机在其步进过程中把转子从一个嵌顿位置拖到下一个嵌顿位置的过程与连续旋转电机持续维持的拖动是同一个过程。到达并稳定到新的嵌顿位置对应旋转电机的整步运行;脉冲激励时如果一个步进脉冲没能把转子拖到新嵌顿位置,转子退回到开始位置对应旋转电机的一个失步周期。
图 26 的左半部分是将图 25 中左侧的 3 对-4 对极沿周长展开成平面,并只保留 3 极-4 极的简化图,用来解释脉冲激励的传统步进电机的工作过程。图 26 左上图中极 A 和极 0 对准,磁路短、磁阻低。如果要使转子沿图中箭头方向移动、到达左下图所示的下一个嵌顿位置,则需要加大对线圈PB的激励。该激励需要克服把 A 和 0 拉开的阻力,才能使 B 和 1 对准,完成一次步进。
左侧步进结构的分辨率由极的组数和极数差决定,受限制于线圈充填空间的限制,不容易提高。右上图用来说明利用极齿增加分辨率的原理,右下图是一个游标卡尺的图片,利用每对磁极相对极齿的齿数差,可以使每次对磁极驱动只移动每个极所占角度的“齿数差/齿数”倍,取得更高分辨率。回看左上图,如果换成对 PD 通电,则把转子向另一个方向拉动、使 D 和 2 对准。这再次印证了如果要控制启动旋向,磁极不能是对偶的;有漏磁才能控制扭矩定向。
图 26 中的磁路差仅仅是由极齿的些许错开导致的;为了突出这种磁路差,图 27 用 3 极对 1 极表达了这种磁路差,并把 2 个嵌顿位置之间的距离记做一个 360°循环。图 28 表达了在这个循环内磁场储能和约束力的变化,以及如何利用连续地配置驱动电流比例、改变合成的磁极产生拖动。
图 28 中的储能变化可以是永磁体与软磁体铁芯相互作用的结果,也可以是在励磁磁场磁路变化造成的。传统的脉冲驱动步进电机驱动时只要脉冲驱动期间提供的能量高于储能波动的部分,就可以把转子拉过不稳定点、进入下一个嵌顿点。越过嵌顿点后,激励产生的推力和势能变化在同一个方向上使转子加速移动到下一嵌顿点。如果没有阻尼设计,转子不会快速稳定到下一嵌顿点,而是会在该嵌顿点两侧以欠阻尼振荡慢慢稳定。对步进电机的驱动可以是相电流组合,也可以是电流单脉冲。单脉冲驱动设计时,各相电流绝对值的总和与永磁体磁场强度的代数和共同决定向嵌顿点的约束力和驱动脉冲幅度;控制脉冲持续时间与采用预加重波形驱动可减少在新嵌顿点的振荡时间。采用电流组合或脉冲驱动时相当于突然移动了定子磁场的位置,然后等着转子被拖动过来。图 28 中的橙色曲线用来说明细分驱动的情况,细分驱动利用控制相电流的比例关系,使合成的磁极偏离线圈和铁芯的实际位置。如果考虑到电流可以转换到反向,并且不考虑永磁体磁场的部分,该移动可以达 180°。利用细分一方面可以使嵌顿点细微移动,提高分辨率;另一方面它可以缓慢地使转子移动和停止,减轻振荡和噪声(相当于从相电流组合的每次变化对应360°移动,变成的细分程度决定微小移动)。当合成的定子磁极位置比转子位置超前90°时约束力最大。如果转子需要克服的只是摩擦力,超前90°仍可维持拖动;如果是主动动力则约束力开始减小、失步退回前一嵌顿点。如果一直保持合成磁极不断地循环移动,转子也会不断地跟着移动,这时步进电机就跟其它电机一样了。期间如果一直保持了较稳定的超前角即同步电机的工作模式,如果保持不住即异步模式。磁场能和扭矩与电流直接关联,大多步进电机以控制其电流方式驱动。在高速 BEMF 作用大时,采用控制电压的驱动方式可以更快地响应速度变化。
与步进电机有意利用嵌顿点不同,伺服电机和电磁铁需要更精准的控制。图 28 中嵌顿点附近储能变化平缓,需要从磁极结构布局上避开。图 25 右侧的交错布置使得总有线圈与对侧磁极处于 90° 左右,从而使其在任何位置都有高控制增益。电磁铁则利用限位装置使其工作在0°~180°范围中的任意一段,或采用线圈接力的方式使动铁保持在 90°附近。
所有电磁拖动装置同构。掌握好步进电机(或电磁铁)在 2 个嵌顿点之间的移动及其驱动要求有助于理解所有其它种类的装置,惠及产品设计和应用。
7 电机驱动系列产品
| Part Number | Motor Type | VCC Min(V) | VCC Max(V) | RMS Output Current (A) | Peak Output Current (A) | Control Interface | RDS(ON) (HS+LS) per Channel (mΩ) | Operating Temperature Range (℃) | Package |
|---|---|---|---|---|---|---|---|---|---|
| SGM42403 | Low-side Driver | 8.5 | 50 | 1/CH | 2 | EN/IN | 350 | -40 to +125 | TSSOP-16 (Exposed Pad),SOIC-20 |
| SGM42403Q | Low-side Driver | 6.5 | 50 | 1.1/CH | 2 | EN/IN | 350 | -40 to +125 | TSSOP-16A (Exposed Pad) |
| SGM42406 | Low-side Driver | 8 | 38 | 0.51/CH | 1 | Serial Interface | 780 | -40 to +85 | TSSOP-16,TSSOP-16 (Exposed Pad) |
| SGM42500 | Brushed DC Motor | 7 | 40 | 3.6 | PWM | 410 | -40 to +125 | SOIC-8 (Exposed Pad) | |
| SGM42501 | Brushed DC Motor | 7 | 40 | 3.6 | PH/EN | 410 | -40 to +125 | SOIC-8 (Exposed Pad) | |
| SGM42505 | Brushed DC Motor | 7 | 40 | 3.6 | PWM | 410 | -40 to +125 | SOIC-8 (Exposed Pad) | |
| SGM42506 | Brushed DC Motor | 7 | 40 | 3.6 | PH/EN | 410 | -40 to +125 | SOIC-8 (Exposed Pad) | |
| SGM42507 | Brushed DC Motor | 1.9 | 7.5 | 1.5 | PH/EN | 555 | -40 to +125 | SC70-6,TSOT-23-6 | |
| SGM42512 | Brushed DC Motor | 1.9 | 5.5 | 1.5 | PH/EN | 545 | -40 to +125 | TSOT-23-6 | |
| SGM42513 | Brushed DC Motor | 1.9 | 5.5 | 1.5 | PWM | 545 | -40 to +125 | TSOT-23-6 | |
| SGM42540 | Brushed DC Motor | 8 | 45 | 3.5 | 4.5 | PH/EN | 210 | -40 to +85 | TSSOP-28 (Exposed Pad) |
| SGM42541 | Brushed DC/Stepper Motor | 8 | 45 | 2 | PWM | 420 | 40 to +85 | TSSOP-28 (Exposed Pad) | |
| SGM42544 | Brushed DC/Stepper Motor | 8 | 45 | 1.75 | 2 | EN/IN | 440 | -40 to +125 | TSSOP-28 (Exposed Pad) |
| SGM42553 | Three-Phase Brushless DC Motor | 8 | 45 | 3 | EN/IN | 360 | -40 to +125 | TSSOP-28 (Exposed Pad),TQFN-6×6-36AL | |
| SGM42560 | Three-Phase Brushless DC Motor | 3 | 18 | 2.5 | 5 | PWM/EN | 170 | -40 to +125 | TQFN-3×4-24L |
| SGM42561 | Three-Phase Brushless DC Motor | 3 | 18 | 2.5 | 5 | HS/LS | 170 | -40 to +125 | TQFN-3×4-24L |
| SGM42562 | Three-Phase Brushless DC Motor | 3 | 18 | 2.5 | 5 | Hall-Signal | 170 | -40 to +125 | TQFN-3×4-24L |
| SGM42600 | Brushed DC/Stepper Motor | 2.7 | 24 | 1.5 | 2 | PWM | 410 | -40 to +125 | TSSOP-16 (Exposed Pad),TQFN-4×4-16L |
| SGM42606 | DC Motor | 2 | 12 | 3 | 6 | PWM | 72 | -40 to +85 | TQFN-5.5×3.5-24L |
| SGM42609 | Brushed DC Motor | 2.7 | 24 | 1.5 | 2 | PWM | 480 | -40 to +125 | MSOP-10,TDFN-3×3-10L |
| SGM42610 | Brushed DC/Stepper Motor | 2.5 | 16 | 0.85 | 1.2 | 4×PWM | 1540 | -40 to +85 | MSOP-10(Exposed Pad),SSOP-10 |
| SGM42611A | Brushed DC/Stepper Motor | 2.5 | 16 | 0.85 | 1.2 | 4×PWM | 1540 | -40 to +85 | MSOP-10(Exposed Pad),SSOP-10 |
| SGM42611B | Brushed DC/Stepper Motor | 2.5 | 16 | 0.85 | 1.2 | 2×PWM | 1540 | -40 to +85 | MSOP-10(Exposed Pad),SSOP-10 |
| SGM42613 | StepperMotor | 8.2 | 36 | 2 | 2.5 | PH/EN | 490 | -40 to +125 | TSSOP-28 (Exposed Pad) |
| SGM42622B | StepperMotor | 1.8 | 12 | 1.3 | 2 | STP/DIR | 500 | -40 to +85 | TQFN-3×3-16L |
| SGM42630 | StepperMotor | 8 | 35 | 1.8 | 2.6 | STP/DIR | 290 | -40 to +85 | TSSOP-28 (Exposed Pad) |
| SGM42633 | Brushed DC/Stepper Motor | 2.5 | 12 | 0.6 | 1 | PWM | 1610 | -40 to +125 | TSSOP-16 (Exposed Pad),TQFN-3×3-16L |
注释
1 利用输出不同占空比得到呈正弦或者半正弦直流分量的脉冲宽度调制波序列。
2 归零即励磁电流归零或者退磁的过程。磁极相对位置变化后励磁方向需要相应变化以适应出力的需要。归零形式包括接入反向电源或者利用电容储能将励磁储能送回电源或储能电容,其中利用反向升压后与储能电容做储能交换最有利。升压储能电路稍显繁琐但有利于提高能效和提高可用转速。如果不做专门处理,则反向电动势和阻性损耗参与退磁的占比升高,简单但不利于提高能效。
3 如果在感性电流归零后断开驱动或短路驱动,电机处于自由旋转状态。
4 如果在感性电流归零后保持对绕组短路,绕组的反向电动势在惯性维持期间产生涡流电流。这个涡流电流产生反向扭矩。短路阻抗低时涡流会很大,可使电机快速停止。
5 对绕组反向驱动,驱动电压和之前运动方向的反电动势共同作用使感性电流迅速下降。继续维持反向驱动则开始出现反向出力,即惯性电动势向驱动源回授,同时(可能)更快地减速。
6 堵转时没有反向电动势,全部驱动电压长时间施加在绕组电感导致电流激增。可以间歇驱动、以小幅度波动维持电流保持扭矩,使电机逐步启动。
7 同步电机控制驱动波与旋转的超前或滞后,逐步把旋转拖入到要求的转速或逐步减速停止。
8 出现部分失效时以安全的方式逐步停止,或以替代的方式维持运行。
9 具备矢量控制能力的系统受控地逐步拖入运行,减小启动时的堵转冲击。
10 BJT、SCR、OTG、TRIAC、Darlington 和 IGBT 雪崩击穿时配合离散电感产生负阻震荡可能导致持续二次击穿,直至烧毁开关。
11 驱动期间变换电压、驱动源内阻、电流,临界饱和驱动等等。
12 检测动作发起端的开关状态,如是否脱离线性段(Miller 平台),决定启动跟随端。
13 变送器指对传感器信号调理后、具有某种标准形式的输出的单元;传感器强调其把非电信号转换成电信号的角色,不一定要求标准输出形式和供电形式。常用外部方案包括光电编码、磁编码、旋变电机、自整角机、电阻/电容/电感应变计;内部方案包括正交分量测量和磁极耦合关系测量。
14 这个要求与从增强可靠性出发要求降额使用不是一个概念。TI 的驱动产品资料中多有讨论。
15 可见于 SGM42630 说明;其设计参考了 TI 公司的 DRV8818,性能有些许改良,可互换使用。
16 过流时采用维持电流通道的方式保护以保持一定扭矩。同时,保持导通时的抗电流过载能力大于开关的体二极管的抗过载能力。
17 大多 MCU IO 有独立的输出寄存器和 IO 检测,报告 IO 状态与寄存器出现了不同。
18 图 3 ~ 图 5,图 7 ~ 图 9 波形由圣邦微电子(北京)股份有限公司研发部实验室配合获取。
19 图 6、图 10 波形由圣邦微电子(北京)股份有限公司北京应用试验室配合获取。
20 此信号不能取代电磁铁/电磁阀位置信息,它只真实反映欠压和过流情况。它可以作为一个辅助信号判断是否正常加速和已经出现限位阻塞。
21 采用移动反馈精细控制阻尼过程时,PWM 调制输出的频率需要远大于移动反馈的带宽。
22 图 13~图 15 采集自互联网鹏芃科艺图片;鹏芃科艺网页声明允许引用其图片用于科普。
23 同步和异步指转子凸极是否能跟得上定子旋转磁场的变化。跟得上是同步,反之是异步。
24 3 段、5 段、2 段是指一个 PWM 周期内的不同阶段或区间(如图 16 为 1、0、-1 三个阶段)。
25 120°、150°、180°是指电机控制中每相绕组被激活后持续的电角度。例如,在 120°控制中,每个 PWM 周期被分成三个 120°的区间;在 180°控制中,每个周期被分成两个 180°的区间,每个区间使用不同的 PWM 占空比来控制电流的幅值和相位,以产生更平滑的电流波形;5 段合成(150°)是对 3 段合成的改进,通过在每个 PWM周期中增加两个额外的步骤,使得电流波形更加接近理想的正弦波。
26 图 21 采集自互联网鹏芃科艺图片;鹏芃科艺网页声明允许引用其图片用于科普。

